發布者:鄧見發布時間:2020-06-20瀏覽次數:191
1.泡動力學與空化流動(數值、實驗)
2.仿生水動力學、流動穩定性
3.船舶水動力學及其它工程應用
Copyrights @ 浙江大學流體工程研究所 All rights reserved
地址:浙江大學玉泉校區教十二 郵編:310027
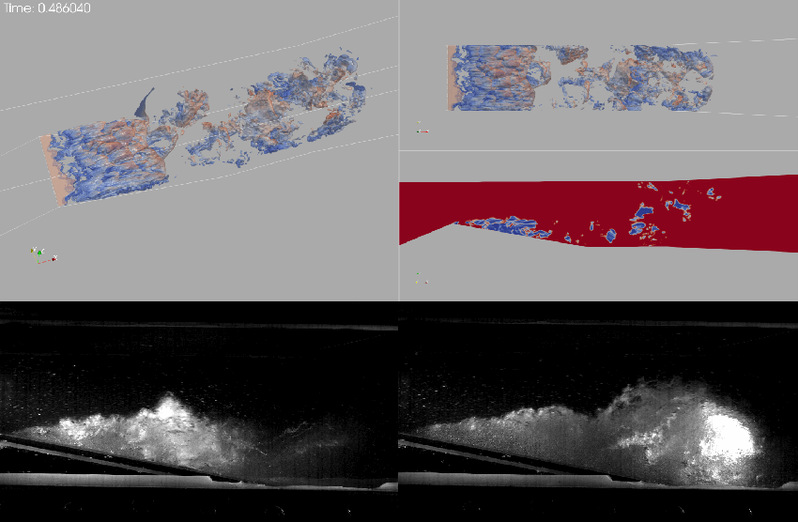 圖1 空化流動的實驗與數值模擬研究
圖1 空化流動的實驗與數值模擬研究 圖2 仿生水動力學(仿生傳感器、仿生推進、集群控制)
圖2 仿生水動力學(仿生傳感器、仿生推進、集群控制)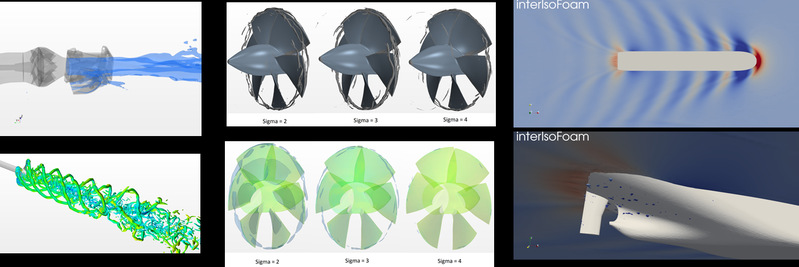 圖3 船舶水動力學圖1 空化流動的實驗與數值模擬研究圖2 仿生水動力學(仿生傳感器、仿生推進、集群控制)圖3 船舶水動力學
圖3 船舶水動力學圖1 空化流動的實驗與數值模擬研究圖2 仿生水動力學(仿生傳感器、仿生推進、集群控制)圖3 船舶水動力學